Social robots and bodily synchronisation
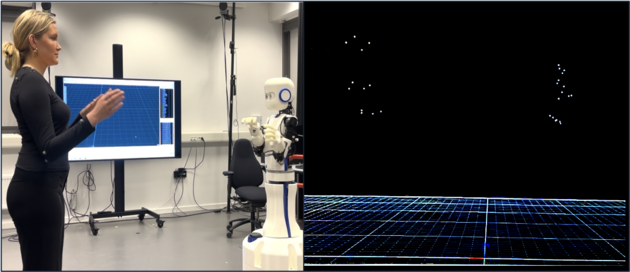
As humans we spontaneously synchronise our body movements when with interact with others, and this supports our social relationship. This project explored whether we also do this with other social agents such as social robots (Fantasia, Rosenfrost, Jonasson, Guldbrand, Saadula, Tjøstheim). It investigated whether and how humans adapt their movements to those of a robot to sustain interpersonal synchrony, and how this may influence the human’s perception of the robot. Through the analysis of real-time body tracking data the study showed that humans displayed more interpersonal synchrony when mirroring another human’s than a robot’s movements. However, synchrony with a robot did increase over time, and this was also linked to higher comfort levels. The results suggest that building synchrony with artificial agents is a dynamic process that influences social connections. The findings will help improve existing models of human-robot interaction to create more natural, intuitive interactions that enhance the effectiveness of social robots in various settings.